The multicopter are quite commonly-seen in our daily life nowadays.Due to their advantages, such as flexibility, low cost, and easy to operate, multicopters now are widely used in military and civilian fields.In this article, the nonlinear mathematical model of the most common multicopters will be given.The physical parameters of simulation model that we adopted in the software-in-the-loop (SIL) and hardware-in-the-loop (HIL) will also be introduced in the end.
Modeling
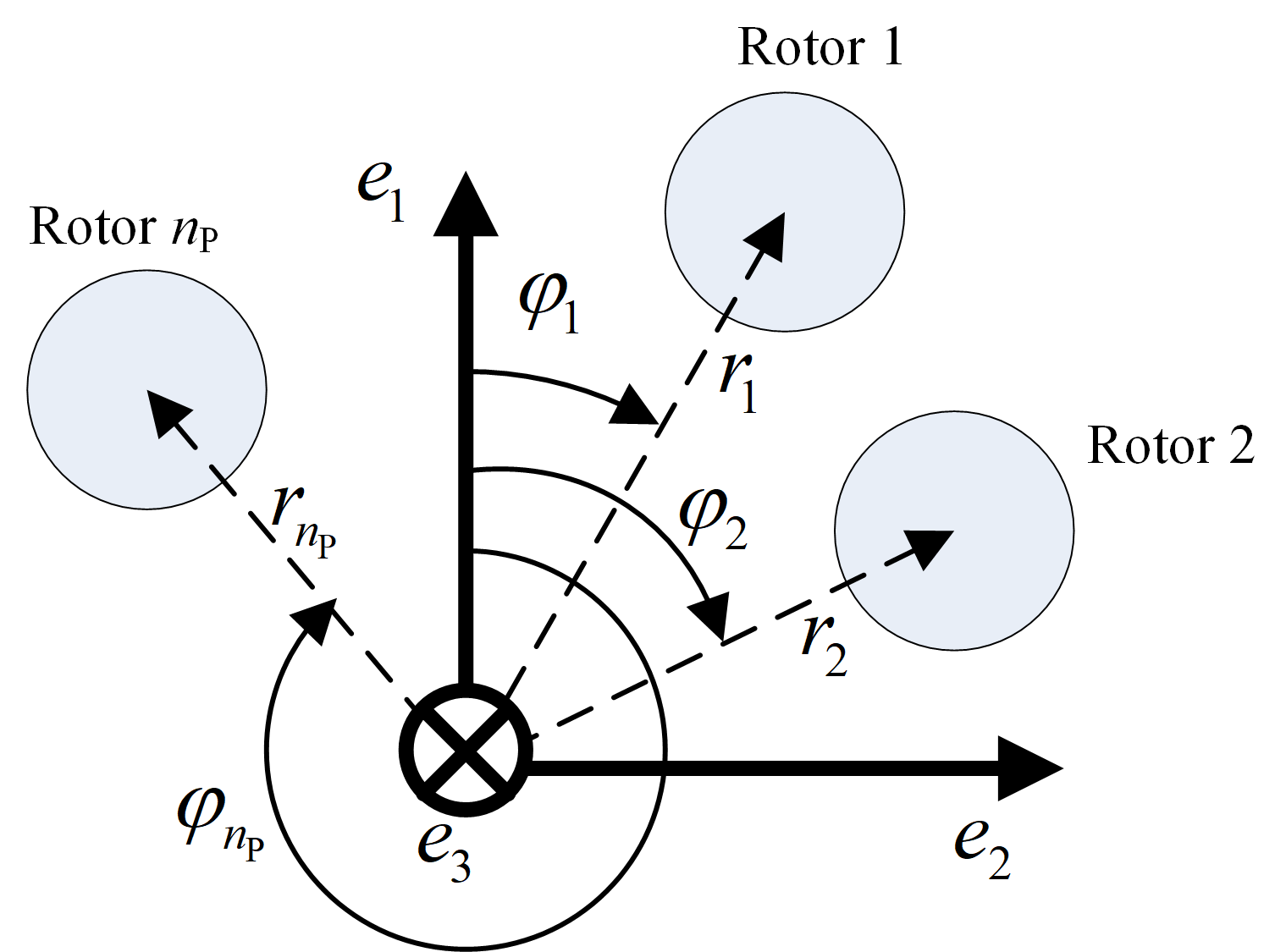
The multicopter is usually equipped with propellers.The mapping from the thrust of each propeller to the thrust and torque vector is given by , where , and is the control allocation matrix. is specified as
where is the distance from the center of the -th propeller to the center of mass, is the ratio of thrust to torque of the -th propeller and is defined by
and are shown in the following figure.
Let denote a right-hand inertial frame and denote a (right-hand) body fixed frame rigidly attached to the aircraft where the center of gravity (CoG) of the multicopter is chosen as the origin of .
Then, the rigid body equations of motion of a multicopter are given by
where denotes the mass of the multicopter, denotes the gravitational acceleration, denotes the unit vector in , and represents the gyroscopic torques.
The vectors and denote the position and linear velocity of the origin of with respect to .The matrix is the constant inertia matrix.The matrix represents the rotation matrix rotating vectors from frame to frame , and the matrix represents the relationship between the attitude rate and the aircraft body's angular velocity.
As shown in the following figure, the propulsor model that we adopt includes not only a DC motor but also an ESC and a propeller.Throttle command is an input signal between 0 and 1, while the battery outputvoltage cannot be controlled.
The ESC generates an equivalent average voltage after receiving the throttle command and the battery output voltage .First, given a voltage signal, the motor can achieve a steady-state speed .The relation is normally linear, which is expressed as
are constant parameters.Secondly, when given a throttle command, the motor needs some time to achieve the steady-state speed .This time constant denoted by will determine the dynamic response.Generally, dynamics of a brushless DC motor can be simplified as a first-order low-pass filter.Its transfer function is expressed as
In others words, when given a desired steady-state speed , the motor speed cannot achieve immediately.This process needs some time to adjust.Combining the above two equations, one has a complete propulsor model as follows:
where the input is the throttle command and the output is motor speed .
The propeller thrust and torque is expressed as
where is modeled as a constant that can be easily determined by experiments. is the reaction torque of the th propeller.
Parameters
The values of all the parameters that mentioned above are listed in the following table.